Op 27 juni 2018 heeft de Japanese Aerospace Exploration Agency’s (JAXA) Hayabusa 2 ruimtevaartuig bereikte asteroïde 162173 Ryugu. Als onderdeel van JAXA's programma om Near-Earth Asteroids (NEA's) te bestuderen, heeft deze missie meer dan een jaar doorgebracht met het uitvoeren van landingsoperaties, het schieten van het oppervlak met "kogels" en een antitankkop en het verzamelen van monsters van het oppervlak en het interieur die zal uiteindelijk naar de aarde terugkeren.
Afgelopen maandag (16 september), Hayabusa 2 twee doelmerkers vrijgegeven als onderdeel van de "doelmerker scheiding operatie" (die liep van 12 september tot 17 september). Dit bestond uit twee ballen van 10 cm (4 inch) bedekt met reflecterend materiaal die in een baan rond Ryugu werden vrijgegeven. Deze operatie brengt de missie een stap dichter bij de inzet van de MINERVA-II2 Rover-2 van de missie, die volgende maand op het oppervlak van de asteroïde zal landen.
Oorspronkelijk gepland voor 5 september, werd de operatie uitgesteld vanwege een afwijking die werd gedetecteerd in een van de reactiewielen van het ruimtevaartuig. Nadat het probleem was opgelost, bracht het missieteam het ruimtevaartuig naar een hoogte van ongeveer 1 km (3.300 voet) van het oppervlak van Ryugu, waar de twee doelmarkeringen werden ingezet in respectievelijk equatoriale en polaire banen.
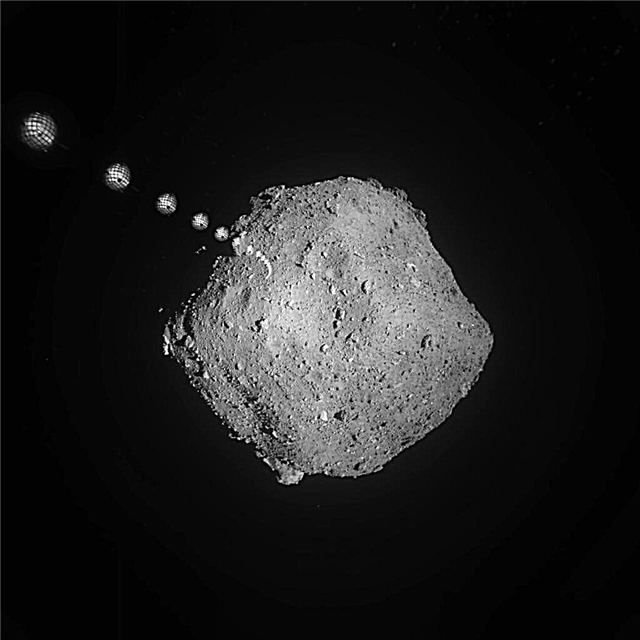
- [email protected] (@ haya2e_jaxa) 17 september 2019Het scheidingsbeeld van de 2e doelmarker, TM-C!
Scheidingstijd: 2019/09/17 om 01:24 JST
Hoogte: 1 kmDit is een overlay van afbeeldingen die elke 4 sec. Worden gemaakt (gedurende ~ 1 minuut) terwijl het ruimtevaartuig stijgt met 11 cm / s. TM daalsnelheid is nog steeds bijna nul. (? JAXA, Chiba Inst. Tech & collab) pic.twitter.com/x3tE5BZI1J
Op maandag om 10:37 uur lokale tijd (02:37 uur PST; 05:37 dinsdag EST) kondigde JAXA hun succes aan op het officiële Twitter-account van de missie. Ze plaatsten ook time-lapse-foto's van de doelmarkeringen die naar de oppervlakte vielen, wat een lichte parabolische boog naar hun afdaling vertraagde. Professor Makoto Yoshikawa, de missiemanager van Hayabusa 2 bij JAXA, gaf ook een verklaring af over het succes van de dienst.
Zoals Makoto zei tijdens een persconferentie op het European Planetary Science Congress (dat nog steeds plaatsvindt in Genève, Zwitserland):
“We hebben twee doelmarkeringen vrijgegeven vanaf een hoogte van ongeveer 1 kilometer, en deze afbeeldingen zijn zojuist vrijgegeven. Het doel van deze release is een repetitie van de release van de MINERVA-II-2 kleine rover volgende maand ... We kunnen de baan van de doelmarkering rond Ryugu observeren en we kunnen vervolgens het zwaartekrachtveld van Ryugu in detail bepalen, dus dit is een nieuwe operatie."
Daarna steeg het ruimtevaartuig naar een hoogte van 20 km (12,4 mijl) boven het oppervlak van Ryugu. Vanuit die positie zal de optische camera van het ruimtevaartuig de doelmarkeringen continu observeren terwijl ze in een baan draaien en langzaam afdalen naar Ryugu. Dankzij de reflecterende coating op de markers, zullen hun banen tijdens hun baan en afdaling gemakkelijk kunnen worden gevolgd.
Deze fase van de missie staat bekend als de "Target marker orbit observation operation", die zal doorgaan tot 23 september (wanneer verwacht wordt dat de TM's de oppervlakte zullen bereiken). Uiteindelijk is het doel van de TM's om te fungeren als navigatiehulpmiddelen, die de missiecontrollers zullen helpen zich voor te bereiden op de inzet van Hayabusa 2‘S MINERVA-II2 rover (ook bekend als ROVER-2), die gepland staat in oktober.

Net als de vorige MINERVA-II-rover (ROVER-1), zal ROVER-2 op het oppervlak landen, rondhuppelen om te verhuizen en wetenschappelijke operaties uitvoeren met zijn reeks wetenschappelijke instrumenten - waaronder twee camera's, een thermometer en een versnellingsmeter. Dit vertegenwoordigt de laatste fase van Hayabusa 2‘S wetenschapscampagne in Ryugu - die in december afloopt, gevolgd door het ruimtevaartuig dat terugkeert naar de aarde (arriveert in december 2020).
Alles bij elkaar zal het ruimtevaartuig drie mobiele landers hebben ingezet om het oppervlak van Ryugu te verkennen, dat bestaat uit de twee MINERVA-II-rovers en de grotere Mobile Asteroid Surface Scout (MASCOT). Deze lander is ontwikkeld door het Duitse lucht- en ruimtevaartcentrum (DLR) en het Franse nationale centrum voor ruimtevaartstudies (CNES) en landde in september 2018 op het oppervlak van Ryugu met ROVER-1 (waar hij 17 uur verkende voordat de batterij stierf.
Het heeft ook een aantal landingen uitgevoerd om monsters te verzamelen voor terugkeer naar de aarde. Deze zullen door wetenschappers uitgebreid worden bestudeerd om meer te leren over de vroege geschiedenis van het zonnestelsel. Dit kan aanwijzingen geven over hoe water werd gedistribueerd en (ervan uitgaande dat organische stof wordt gevonden) hoe en wanneer het leven ook is ontstaan.
"Als we 0,1 gram (materiaal) hebben, kunnen we alle monsteranalyses uitvoeren, maar we hopen dat we nog veel meer zullen hebben", zei Yoshikawa. 'We willen de organische stof op Ryugu bestuderen omdat we de oorsprong van het leven op aarde willen weten, en we denken dat Ryugu