Hieronder volgt het laatste fragment uit mijn nieuwe boek, "Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos." Het boek is een kijkje achter de schermen bij verschillende huidige NASA-robotmissies, en dit fragment is deel 3 van 3 dat hier is geplaatst op Space Magazine, van hoofdstuk 2, "Roving Mars with Curiosity." Je kunt deel 1 hier lezen en deel 2 hier. Het boek is verkrijgbaar in print of e-book (Kindle of Nook) Amazon en Barnes & Noble.
Hoe een Mars Rover te besturen
Hoe weet Curiosity waar en hoe over het oppervlak van Mars te rijden? Je zou je ingenieurs bij JPL kunnen voorstellen die joysticks gebruiken, vergelijkbaar met die gebruikt voor speelgoed met afstandsbediening of videogames. Maar in tegenstelling tot RC-rijden of gamen, hebben de Mars rover-stuurprogramma's geen onmiddellijke visuele invoer of een videoscherm om te zien waar de rover naartoe gaat. En net als bij de landing is er altijd een tijdsvertraging wanneer een commando naar de rover wordt gestuurd en wanneer het op Mars wordt ontvangen.
"Het is niet rijden in een real-time interactieve zin vanwege de vertraging", legt John Michael Morookian uit, die het team van roverbestuurders leidt.
De eigenlijke functietitel van Morookian en zijn team is ‘Rover Planners’, wat precies beschrijft wat ze doen. In plaats van 'rijden' de rovers per se; ze plannen de route van tevoren, programmeren gespecialiseerde software en uploaden de instructies naar Curiosity.
'We gebruiken afbeeldingen die zijn gemaakt door de rover van zijn omgeving', zei Morookian. “We hebben een set stereobeelden van vier zwart-witnavigatiecamera's, samen met beelden van de Hazcams (gevarenvermijdingscamera's), ondersteund door kleurenbeelden met hoge resolutie van de MastCam die ons details geven over de aard van het terrein vooruit en aanwijzingen over soorten gesteenten en mineralen op de site. Dit helpt bij het identificeren van structuren die interessant lijken voor de wetenschappers. ”
Met behulp van alle beschikbare gegevens kunnen ze een driedimensionale visualisatie van het terrein maken met gespecialiseerde software, het Rover Sequencing and Visualization Program (RSVP).
"Dit is in feite een Mars-simulator en we hebben een gesimuleerde nieuwsgierigheid in een panorama van de scène geplaatst om te visualiseren hoe de rover zijn pad zou kunnen afleggen", legde Morookian uit. “We kunnen ook een stereoglazen opzetten, waardoor onze ogen de scène in drie dimensies kunnen zien alsof we er met de rover waren.
In virtual reality kunnen de roverbestuurders de scène en de rover manipuleren om elke mogelijkheid te testen welke routes het beste zijn en welke gebieden moeten worden vermeden. Daar kunnen ze alle fouten maken (vast komen te zitten in een duin, de rover kantelen, tegen een grote rots botsen, een afgrond afrijden) en de rijvolgorde perfectioneren terwijl de echte rover veilig op Mars blijft.
“De wetenschappers bekijken de afbeeldingen ook op interessante kenmerken en raadplegen de Rover-planners om een pad te helpen bepalen. Vervolgens stellen we de gedetailleerde opdrachten samen die nodig zijn om nieuwsgierigheid van punt A naar punt B langs dat pad te krijgen, 'zei Morookian. "" We kunnen ook de commando's opnemen die nodig zijn om de rover richting te geven om contact te maken met de site met behulp van zijn robotarm. "

Dus elke avond krijgt de rover het bevel om acht uur stil te staan om zijn batterijen op te laden met de nucleaire generator. Maar eerst stuurt Curiosity gegevens naar de aarde, inclusief foto's van het terrein en alle wetenschappelijke informatie. Op aarde nemen de Rover Planners die gegevens, doen hun planningswerk, voltooien de software-programmering en sturen de informatie terug naar Mars. Dan wordt Curiosity wakker, downloadt de instructies en gaat aan de slag. En de cyclus herhaalt zich.
Curiosity heeft ook een AutoNav-functie waarmee de rover gebieden kan doorkruisen die het team nog niet in afbeeldingen heeft gezien. Het kan dus over de heuvel gaan en langs de andere kant naar onbekend terrein, waarbij de AutoNav potentiële gevaren detecteert.
"We gebruiken het niet te vaak omdat het rekenkundig duur is, wat betekent dat het veel langer duurt voordat de rover in die modus werkt," zei Morookian. "We vinden het vaak een betere ruil om de volgende dag gewoon binnen te komen, naar de afbeeldingen te kijken en zo ver mogelijk te rijden."

Terwijl Morookian me de verschillende kamers liet zien die worden gebruikt door roverplanningsteams bij JPL, legde hij uit hoe ze moeten werken op een aantal verschillende tijdschema's.
"We hebben niet alleen de dagelijkse routeplanning", zei hij, "maar we maken ook strategische planning op lange afstand met behulp van orbitale beelden van de HiRISE-camera op de Mars Reconnaissance Orbiter en kiezen paden op basis van de kenmerken vanuit de ruimte. Ons team werkt strategisch en kijkt vele maanden uit om de beste paden te bepalen. ”
Een ander proces genaamd Supra-Tactical kijkt uit naar de volgende week. Dit houdt in dat wetenschapsplanners de soorten activiteiten beheren en verfijnen die de rover op korte termijn zal uitvoeren. Omdat niemand in het team meer op Mars Time woont, werken de Rover Planners op vrijdag de plannen voor meerdere dagen uit.
"Aangezien we niet in het weekend werken, bevatten de vrijdagplannen meerdere activiteitenzones", zei Morookian. "Twee parallelle teams beslissen op welke dagen de rover zal rijden en op welke dagen hij andere activiteiten zal uitvoeren, zoals werken met de robotarm of andere instrumenten."
De gegevens die tijdens het weekend van de rover komen, worden echter bewaakt en als er een probleem is, wordt een team ingeschakeld om een meer gedetailleerde beoordeling uit te voeren. Morookian gaf aan dat ze verschillende keren het noodweekendteam moesten inschakelen, maar tot nu toe zijn er geen ernstige problemen geweest. 'Het houdt ons echter scherp,' zei hij.
De rover beschikt over een aantal reactieve veiligheidscontroles op de totale kanteling van het roverdek en de articulatie van het veersysteem van de wielen, dus als de rover over een te groot object gaat, stopt hij automatisch.
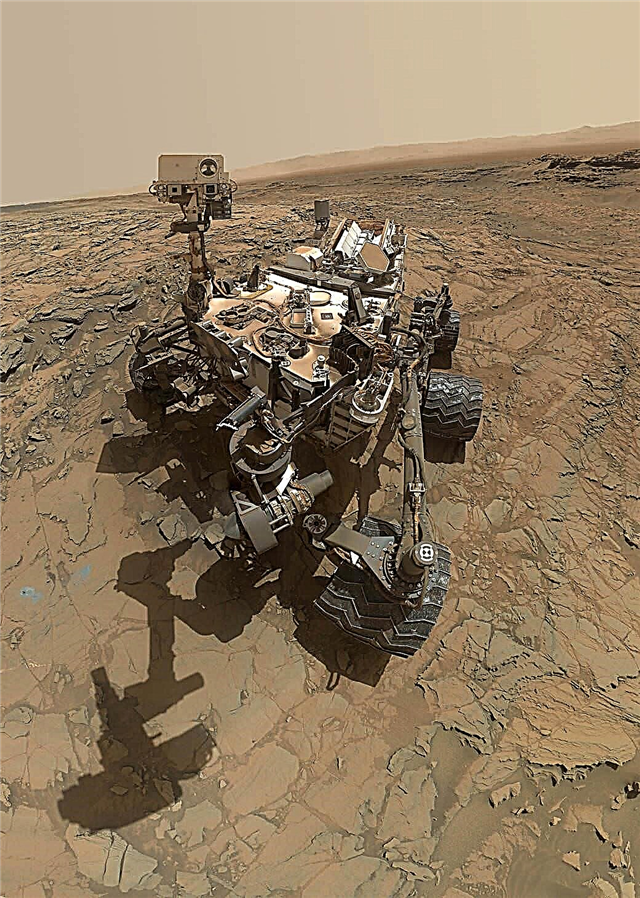
Nieuwsgierigheid was niet gebouwd op snelheid. Het is ontworpen om binnen een dag tot 200 meter te reizen, maar het reist zelden zo ver in een Sol. Begin 2016 had de rover in totaal ongeveer 12 kilometer over het oppervlak van Mars gereden.

Er zijn verschillende manieren om te bepalen hoe ver de nieuwsgierigheid is gereisd, maar de meest nauwkeurige meting wordt 'visuele odometrie' genoemd. De nieuwsgierigheid heeft speciale gaten in de wielen in de vorm van morsecode-letters, met de aanduiding 'JPL' - een knipoog naar het huis van de wetenschappelijke en technische teams van de rover - over de bodem van Mars.
"Visuele odometrie werkt door het vergelijken van het meest recente paar stereobeelden dat ongeveer elke meter over de drive is verzameld", zegt Morookian. "Individuele kenmerken in de scène worden op elkaar afgestemd en bijgehouden om een maat te geven voor hoe de camera (en dus de rover) heeft vertaald en geroteerd in een driedimensionale ruimte tussen de twee afbeeldingen en het vertelt ons in een zeer reële zin hoe ver de nieuwsgierigheid is gegaan . '
Nauwkeurige inspectie van de rover-tracks kan uitwijzen welk type tractie de wielen hebben en of ze zijn uitgegleden, bijvoorbeeld door hoge hellingen of zandgrond.
Helaas heeft Curiosity nu nieuwe gaten in de wielen die er niet zouden moeten zijn.
Rover problemen
Morookian en projectwetenschapper Ashwin Vasavada waren beide opgelucht en tevreden dat Curiosity over het algemeen - zo ver in de missie - een redelijk gezonde rover is. De volledige wetenschappelijke lading werkt momenteel op bijna volledige capaciteit. Maar het technische team houdt een paar zaken in de gaten.
"Rond de sol 400 realiseerden we ons dat de wielen sneller slijten dan we hadden verwacht," zei Vasavada.

En de slijtage bestond niet uit slechts kleine gaatjes; het team begon lekke banden en vervelende tranen te zien. Ingenieurs realiseerden zich dat de gaten werden gemaakt door de harde, grillige rotsen waar de rover in die tijd overheen reed.
"We verwachtten niet helemaal het soort" puntige "rotsen die schade aanrichtten," zei Vasavada. “We hebben ook wat getest en gezien hoe het ene wiel een ander wiel in een rots kon duwen, waardoor de schade erger werd. We rijden nu voorzichtiger en rijden niet zo lang als in het verleden. We hebben de schade kunnen terugdringen tot een acceptabeler tarief. "
In het begin van de missie ging de computer van Curiosity verschillende keren in de ‘veilige modus’, omdat de Curiosity-software een probleem herkende en de reactie was om verdere activiteiten en het bellen naar huis niet toe te staan.
Gespecialiseerde software voor foutbeveiliging loopt door de modules en instrumenten en wanneer er een probleem optreedt, stopt de rover en verzendt hij gegevens met de naam ‘Event Records’ naar de aarde. De records bevatten verschillende categorieën urgentie, en begin 2015 stuurde de rover een bericht dat in wezen zei: "Dit is heel erg slecht." De boor op de arm van de rover had een fluctuatie in een elektrische stroom ervaren - zoals een kortsluiting.
"De software van Curiosity heeft de mogelijkheid om korte broeken te detecteren, zoals de aardlekschakelaar in je badkamer," legde Morookian uit, "behalve dat deze je vertelt" dit is heel erg slecht "in plaats van alleen maar een geel lampje te geven."
Aangezien het team niet naar Mars kan gaan om een probleem op te lossen, wordt alles opgelost door software-updates naar de rover te sturen of door de operationele procedures te wijzigen.

"We zijn nu gewoon voorzichtiger met hoe we de boor gebruiken", zei Vasavada, "en boren in het begin niet met volle kracht, maar lopen langzaam op. Het lijkt een beetje op hoe we nu rijden, voorzichtiger, maar het klopt nog steeds. Het heeft tot nu toe geen enorme impact gehad. "
Een lichtere aanraking van de boor was ook nodig voor de zachtere modderstenen en zandstenen die de rover tegenkwam. Morookian zei dat er bezorgdheid was dat de gelaagde rotsen mogelijk niet stand houden onder de aanval van het standaard boorprotocol, en daarom pasten ze de techniek aan om de laagste ‘instellingen’ te gebruiken waardoor de boor nog steeds voldoende voortgang in de rots kan maken.
Maar de mogelijkheden om de boor te gebruiken nemen toe naarmate de nieuwsgierigheid de berg op begint. De rover reist door wat Vasavada een 'doelwitrijk, zeer interessant gebied' noemt, terwijl het wetenschapsteam de geologische context van alles wat ze in de beelden zien, met elkaar verbindt.
Balans vinden op Mars
Terwijl de afleiding in Yellowknife Bay het team in staat stelde enkele belangrijke ontdekkingen te doen, voelden ze druk om naar Mt. Scherp, dus 'reed een jaar lang als een hel', zei Vasavada.
Nu op de berg is er nog steeds de druk om het meeste uit de missie te halen, met als doel om door ten minste vier verschillende rotseenheden - of lagen - op Mt. Scherp. Elke laag kan zijn als een hoofdstuk in het boek over de geschiedenis van Mars.

“Mt. Sharp is fascinerend, "zei Vasavada," en we proberen een mix te behouden tussen echt geweldige ontdekkingen, die - je haat het om te zeggen - ons vertragen en hoger op de berg komen. Als je goed naar een rots voor je kijkt, kun je nooit naar die andere interessante rots gaan kijken. "
Vasavada en Morookian zeiden allebei dat het een uitdaging is om die balans elke dag te bewaren - om de zogenaamde 'knie in de bocht' of 'goede plek' te vinden van de perfecte optimalisatie tussen autorijden en stoppen voor de wetenschap.
Dan is er de balans tussen stoppen om een volledige observatie te doen met alle instrumenten en 'flyby science' doen waar minder intense observaties worden gemaakt.
"We nemen de waarnemingen die we kunnen en genereren alle hypothesen die we kunnen in realtime", zei Vasavada. "Zelfs als we 100 open vragen hebben, weten we dat we de vragen later kunnen beantwoorden, zolang we weten dat we voldoende gegevens hebben verzameld."
Het belangrijkste doel van nieuwsgierigheid is niet de top, maar in plaats daarvan een gebied op ongeveer 400 meter hoogte waar geologen de grens verwachten te vinden tussen rotsen die in hun geschiedenis veel water zagen en die niet. Die grens zal inzicht geven in de overgang van Mars van een natte naar een droge planeet en een belangrijke leemte opvullen in het begrip van de geschiedenis van de planeet.

Niemand weet echt hoe lang nieuwsgierigheid zal duren, of dat het iedereen zal verrassen zoals zijn voorgangers Spirit en Opportunity. Na de ‘hoofdmissie’ van een jaar op Mars (twee aardse jaren) te hebben doorstaan, en nu in de uitgebreide missie, is de enige grote variabele de RTG-stroombron. Hoewel de beschikbare stroom geleidelijk zal afnemen, verwachten zowel Vasavada als Morookian niet dat dit nog minstens vier jaar op aarde een probleem zal zijn, en met de juiste 'koestering' kan de macht twaalf jaar of langer aanhouden.
Maar ze weten ook dat er geen manier is om te voorspellen hoe lang nieuwsgierigheid zal duren of welke onverwachte gebeurtenis de missie zou kunnen beëindigen.
Het beest
Heeft Curiosity een persoonlijkheid zoals de vorige Mars-rovers?
"Eigenlijk niet, we lijken deze rover niet te antropomorfiseren zoals mensen deden met Spirit and Opportunity", zei Vasavada. "We hebben er geen emotionele band mee. Sociologen hebben dit echt bestudeerd. ' Hij schudde zijn hoofd met een geamuseerde glimlach.
Vasavada gaf aan dat het misschien iets te maken heeft met de grootte van Curiosity.
'Ik beschouw het als een gigantisch beest', zei hij met een strak gezicht. 'Maar helemaal niet gemeen.'

Wat deze missie gaat typeren, zei Vasavada, is de complexiteit ervan, in elke dimensie: de menselijke component om 500 mensen aan het werk te krijgen en samen te laten werken terwijl ze ieders talenten optimaliseren; de rover veilig en gezond houden; en elke dag tien instrumenten draaiende houden, die soms volledig niet-verwante wetenschappelijke taken uitvoeren.
"Elke dag is onze eigen 'zeven minuten van terreur', waar zoveel dingen elke dag goed moeten gaan," zei Vasavada. “Er zijn een miljoen potentiële problemen en interacties en je moet constant nadenken over alle manieren waarop dingen fout kunnen gaan, want er zijn een miljoen manieren waarop je een fout kunt maken. Het is een ingewikkelde dans, maar gelukkig hebben we een geweldig team. "
Vervolgens voegde hij er met een glimlach aan toe: 'Deze missie is echter spannend, ook al is het een beest.'
"Incredible Stories From Space: A Behind-the-Scenes Look to the Missions Changing Our View of the Cosmos" wordt uitgegeven door Page Street Publishing, een dochteronderneming van Macmillan.