Missieplanners haten het echt als ruimterobots uit koers raken. We verbeteren tegenwoordig zeker de kans op succes (denk aan de zeven minuten van terreur van Mars Curiosity?), Maar één ruimtevaartorganisatie heeft een mooie simulator in petto die de landingen nog nauwkeuriger zou kunnen maken.
Bovenstaande software en hardware (getest door de European Space Agency) waren zo onder de indruk van het Franse ruimtevaartcentrum ONERA dat ambtenaren onlangs de hoofdonderzoeker een prijs voor het werk hebben toegekend.
"Als ik een toerist in Parijs ben, zoek ik misschien een routebeschrijving naar beroemde bezienswaardigheden zoals de Eiffeltoren, de Arc de Triomphe of de Notre Dame om mijn positie op een kaart te vinden", aldus Jeff Delaune, de Ph.D . student die het onderzoek uitvoert.
"Als hetzelfde proces vanuit de ruimte wordt herhaald met voldoende oriëntatiepunten aan de oppervlakte gezien door een camera, het oog van het ruimtevaartuig, kan het dan vrij nauwkeurig vaststellen waar het zich bevindt door de visuele informatie automatisch te vergelijken met kaarten die we aan boord in de computer hebben."

Omdat close-up van oriëntatiepunten er van veraf heel anders uit kan zien, heeft dit systeem een methode om dat probleem te omzeilen.
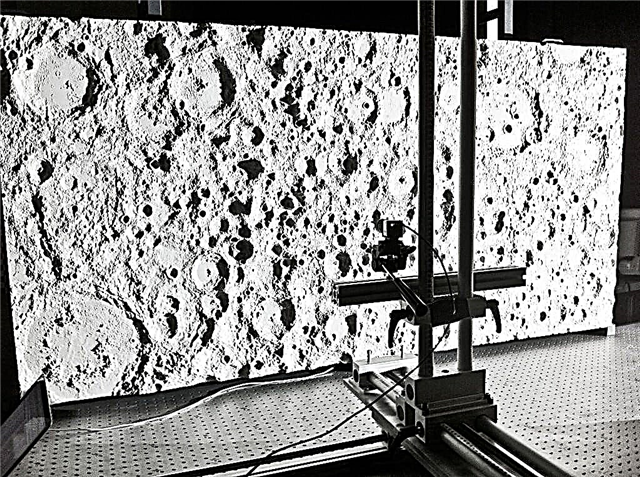
Het zogenaamde 'Landing with Inertial and Optical Navigation' (LION) -systeem neemt de realtime beelden die door de camera van het ruimtevaartuig zijn gegenereerd en vergelijkt deze met kaarten van eerdere missies, evenals 3D-digitale modellen van het oppervlak.
LION kan rekening houden met de relatieve grootte van elk punt dat het ziet, of het nu een enorme krater of een klein rotsblok is.
In het ESA-controlehardwarelaboratorium in Noordwijk, Nederland, testten ambtenaren het systeem met een high-res kaart van de maan.
Hoewel dit slechts een test is en er nog een weg te gaan is voordat dit systeem klaar is voor de ruimte, zei ESA dat de gesimuleerde positienauwkeurigheid beter was dan 164 voet op 1,86 mijl hoogte (of 50 meter op drie kilometer hoogte).
Oh, en hoewel het tot nu toe alleen is getest met gesimuleerd maanterrein, is het mogelijk dat hetzelfde systeem een robot kan helpen landen op een asteroïde of Mars, voegt ESA toe.
Geen woord over wanneer het systeem voor het eerst een interplanetaire rit zal maken, maar Delaune werkt eraan om het onderzoek toe te passen op terrestrische aangelegenheden zoals onbemande luchtvaartuigen.
Bekijk meer details over de tests op de ESA-website.
Bron: ESA