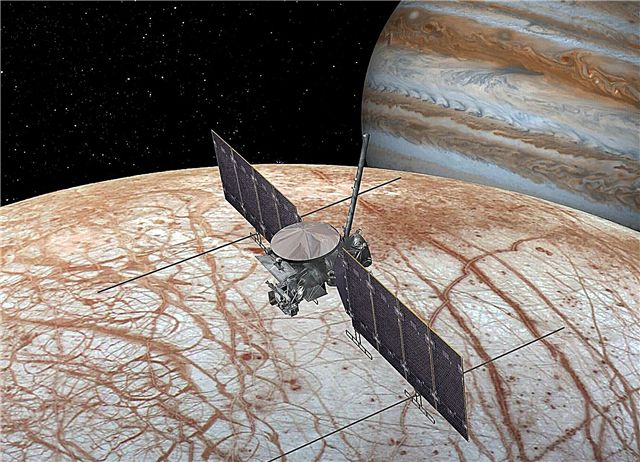
In 2023 is NASA van plan de Europa Clipper missie, een robotverkenner die Jupiters raadselachtige maan Europa zal bestuderen. Het doel van deze missie is om de ijsschaal en het binnenland van Europa te verkennen om meer te weten te komen over de samenstelling, geologie en interacties van de maan tussen het oppervlak en de ondergrond. Bovenal is het doel van deze missie om licht te werpen op de vraag of er al dan niet leven kan bestaan in de binnenzee van Europa.
Dit brengt tal van uitdagingen met zich mee, waarvan vele voortkomen uit het feit dat de Europa Clipper zal heel ver van de aarde verwijderd zijn wanneer het zijn wetenschappelijke operaties uitvoert. Om dit aan te pakken, heeft een team van onderzoekers van NASA's Jet Propulsion Laboratory (JPL) en Arizona State University (ASU) een reeks algoritmen voor machine learning ontworpen waarmee de missie Europa met een zekere mate van autonomie kan verkennen.
Hoe deze algoritmen zouden kunnen helpen bij toekomstige verkenningsmissies in de verre ruimte, was het onderwerp van een presentatie die vorige week (7 augustus) werd gegeven op de 25e ACM SIGKDD-conferentie over kennisontdekking en datamining in Anchorage, Alaska. Deze jaarlijkse conferentie brengt onderzoekers en praktijkmensen in datawetenschap, datamining en analyse van over de hele wereld samen om de nieuwste ontwikkelingen en toepassingen in het veld te bespreken.
Als het erop aankomt, is communiceren met deep-space missies tijdrovend en uitdagend werk. Wanneer je communiceert met missies op het oppervlak van Mars of in een baan om de aarde, kan het een signaal tot 25 minuten duren om ze vanaf de aarde (of weer terug) te bereiken. Het verzenden van signalen naar Jupiter kan daarentegen tussen de 30 minuten en maximaal een uur duren, afhankelijk van waar het zich in zijn baan ten opzichte van de aarde bevindt.
Zoals de auteurs in hun onderzoek opmerken, worden activiteiten van ruimtevaartuigen doorgaans verzonden in een vooraf gepland script in plaats van via realtime opdrachten. Deze aanpak is zeer effectief wanneer de positie, omgeving en andere factoren die het ruimtevaartuig beïnvloeden bekend zijn of van tevoren kunnen worden voorspeld. Het betekent echter ook dat missiecontrollers niet in realtime kunnen reageren op onverwachte ontwikkelingen.
Zoals Kiri L. Wagstaff, hoofdonderzoeker bij NASA JPL's Machine Learning and Instrument Autonomy Group, via e-mail aan Space Magazine uitlegde:
“Het verkennen van een wereld die te ver weg is om directe menselijke controle mogelijk te maken, is een uitdaging. Alle activiteiten moeten vooraf worden vastgelegd. Een snelle reactie op nieuwe ontdekkingen of veranderingen in de omgeving vereist dat het ruimtevaartuig zelf beslissingen neemt, die we ruimtevaartuigautonomie noemen. Bovendien betekent het feit dat de transmissiesnelheden zeer laag zijn omdat ze bijna een miljard kilometer van de aarde verwijderd zijn.
“Het vermogen van het ruimtevaartuig om gegevens te verzamelen is groter dan wat kan worden teruggestuurd. Dit roept de vraag op welke gegevens moeten worden verzameld en hoe deze prioriteit moeten krijgen. Ten slotte wordt het ruimtevaartuig in het geval van Europa ook gebombardeerd door intense straling, die gegevens kan beschadigen en computerresets kan veroorzaken. Omgaan met die gevaren vereist ook autonome besluitvorming. ”
Om deze reden gingen Dr. Wagstaff en haar collega's op zoek naar mogelijke methoden voor gegevensanalyse aan boord die zouden werken waar en wanneer direct menselijk toezicht niet mogelijk is. Deze methoden zijn vooral belangrijk bij het omgaan met zeldzame, voorbijgaande gebeurtenissen waarvan het voorkomen, de locatie en de duur niet kunnen worden voorspeld.
Deze omvatten verschijnselen zoals de stofduivels die op Mars zijn waargenomen, meteorietinslagen, bliksem op Saturnus en ijzige pluimen die worden uitgestoten door Enceladus en andere lichamen. Om dit aan te pakken, keken Dr. Wagstaff en haar team naar recente ontwikkelingen in machine learning-algoritmen, die een zekere mate van automatisering en onafhankelijke besluitvorming in computers mogelijk maken. Zoals Dr. Wagstaff zei:
“Met methoden voor machine learning kan het ruimtevaartuig zelf de gegevens onderzoeken terwijl ze worden verzameld. Het ruimtevaartuig kan dan identificeren welke waarnemingen interessante gebeurtenissen bevatten. Dit kan de toewijzing van downlinkprioriteiten beïnvloeden. Het doel is om de kans te vergroten dat de meest interessante ontdekkingen als eerste worden gedownlinked. Wanneer de gegevensverzameling groter is dan wat kan worden verzonden, kan het ruimtevaartuig zelf de aanvullende gegevens voor waardevolle wetenschappelijke klompjes ontginnen.
“Dankzij analyse aan boord kan het ruimtevaartuig ook beslissen welke gegevens vervolgens moeten worden verzameld op basis van wat het al heeft ontdekt. Dit is aangetoond in een baan om de aarde met behulp van het Autonomous Sciencecraft Experiment en op het oppervlak van Mars met behulp van het AEGIS-systeem op de Mars Science Laboratory (Curiosity) -rover. Autonome, responsieve gegevensverzameling kan de wetenschappelijke verkenning enorm versnellen. We willen dit vermogen ook uitbreiden naar het buitenste zonnestelsel. ”
Deze algoritmen zijn speciaal ontworpen om te helpen bij drie soorten wetenschappelijk onderzoek die voor de Europa Clipper missie. Deze omvatten de detectie van thermische anomalieën (warme plekken), compositorische anomalieën (ongebruikelijke oppervlaktemineralen of afzettingen) en actieve pluimen van ijzige materie uit Europa's ondergrondse oceaan.
'In deze setting is de berekening zeer beperkt', zei dr. Wagstaff. “De computer van het ruimtevaartuig draait op een snelheid die vergelijkbaar is met die van een desktopcomputer van midden tot eind jaren negentig (~ 200 MHz). Daarom hebben we prioriteit gegeven aan eenvoudige, efficiënte algoritmen. Een bijkomend voordeel is dat de algoritmen gemakkelijk te begrijpen, te implementeren en te interpreteren zijn. ”
Om hun methode te testen, paste het team hun algoritmen toe op zowel gesimuleerde gegevens als observaties van eerdere ruimtemissies. Deze omvatten de Galileo ruimtevaartuig, dat spectrale waarnemingen van Europa heeft gedaan om meer te weten te komen over de samenstelling ervan; de Cassini ruimtevaartuig, dat beelden vastlegde van pluimactiviteit op Saturnus 'maan Enceladus; en de Nieuwe horizonten ruimtevaartuig afbeeldingen van vulkanische activiteit op Jupiter's maan Io.
De resultaten van deze tests lieten zien dat elk van de drie algoritmen een voldoende hoge prestatie vertoonde om bij te dragen aan de wetenschappelijke doelen die zijn uiteengezet in de Planetary Science Decadal Survey 2011. Deze omvatten 'het bevestigen van de aanwezigheid van een binnenzee, het karakteriseren van de ijsschaal van de satelliet en het mogelijk maken van inzicht in de geologische geschiedenis' op Europa om 'het potentieel van het buitenste zonnestelsel als een verblijfplaats voor leven' te bevestigen.
Bovendien kunnen deze algoritmen verstrekkende gevolgen hebben voor andere robotmissies naar verre bestemmingen. Naast Europa en het maansysteem van Jupiter hoopt NASA Saturnus 'manen Enceladus en Titan te verkennen voor mogelijke tekenen van leven in de nabije toekomst, evenals bestemmingen die nog verder weg liggen (zoals de maan Triton van Neptunus en zelfs Pluto). Maar de toepassingen stoppen daar niet. Wagstaff zei het:
"De autonomie van ruimtevaartuigen stelt ons in staat te onderzoeken waar mensen niet heen kunnen. Dat omvat afgelegen bestemmingen zoals Jupiter en locaties buiten ons eigen zonnestelsel. Het omvat ook dichterbij gelegen omgevingen die gevaarlijk zijn voor mensen, zoals de bodem van de zeebodem of omgevingen met hoge straling hier op aarde. '
Het is niet moeilijk om je een nabije toekomst voor te stellen waarin semi-autonome robotmissies in staat zijn om de buiten- en binnengebieden van het zonnestelsel te verkennen zonder regelmatig menselijk toezicht. Als we verder in de toekomst kijken, is het niet moeilijk om ons een tijdperk voor te stellen waarin volledig autonome robots in staat zijn om planeten buiten de zon te verkennen en hun bevindingen naar huis te sturen.
En ondertussen een semi-autonoom Europa Clipper zou het bewijs kunnen vinden waar we allemaal op wachten! Dat zouden biosignaturen zijn die bewijzen dat er echt leven is buiten de aarde!