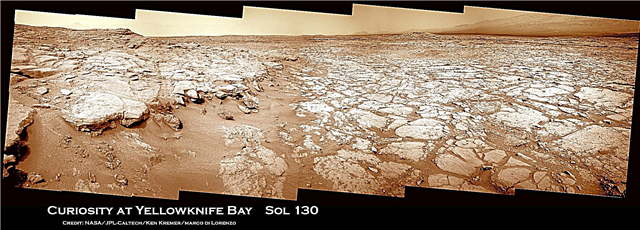
Image Caption: Curiosity Scans ‘Yellowknife Bay’ op Sol 130. 17 die aan elkaar is gestikt van afbeeldingen van navigatiecamera's (Navcam). Krediet: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Vandaag (25 december) viert Curiosity haar eerste kerst op Mars op een plek genaamd ‘Yellowknife Bay’. Het is Sol 138 en bijna 5 maanden sinds de pulserende landing op 6 augustus 2012 in de Gale Crater. De robot verkeert in uitstekende gezondheid.
Ondertussen viert haar oudere zus Opportunity binnenkort een onpeilbare 9 aardse jaren op Mars in een paar korte weken op 24 januari 2013 - aan de andere kant van de planeet.
NASA's Curiosity-rover bereikte de ondiepe depressie ‘Yellowknife Bay’ op Sol 130 (17 december 2012) na ongeveer 0,5 meter afdalen over een zachte helling in een geologische functie genaamd ‘Glenelg’. Bekijk onze panoramische mozaïeken van Yellowknife Bay - boven en onder voor een contextweergave.
Het wetenschapsteam is op zoek naar een interessante rots voor het inaugurele gebruik van de krachtige boorhamer.
Volgens een nieuw rapport in SpaceRef is het boren vertraagd vanwege de bezorgdheid dat wrijvingsverwarming mogelijk het gesteente vloeibaar zou kunnen maken tot een kleverige "Martiaanse honing" die mogelijk de monsterzeven en -mechanismen zou kunnen verstoppen en ernstig zou beschadigen. Daarom evalueert het team zorgvuldig het type rotsdoel en de boorprocedures voordat het zich inzet voor het eerste gebruik van de slagboormachine op de toren aan het uiteinde van de robotarm.
Het team koos ervoor om naar ‘Yellowknife Bay’ te rijden omdat het een ander type geologisch terrein heeft dan waar Curiosity eerder op heeft gereden. Het ‘Glenelg’ gebied ligt op de kruising van drie verschillende soorten geologisch terrein en is Curiosity's eerste uitgebreide wetenschappelijke bestemming.
Nieuwsgierigheid arriveerde aan de rand van Yellowknife Bay op Sol 124 en kwam het bekken binnen op Sol 125 (12 december) en snauwde een verkennend panoramisch uitzicht dat naar de uitnodigende omgeving tuurde. De rover gebruikt ook de APXS X-ray minerale spectrometer, ChemCam laser en MAHLI handlenscamera om initiële wetenschappelijke karakteriseringsgegevens te verzamelen.

De nieuwsgierigheid piekt rond Yellowknife Bay op Sol 125, 12 december 2012. De rover bleef het bekken binnenrijden op zoek naar het eerste doelwit van een rotsboor. Krediet: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Tot dusver heeft de rover een totale rijafstand van ongeveer 0,43 mijl (700 meter) afgelegd.
Het grootste deel van het wetenschappelijke en technische team krijgt een broodnodige pauze om tijd met hun families door te brengen na het uploaden van 11 Sols aan activiteiten van tevoren om de robot te laten neuriën tijdens de kerstvakantie. Een skeletploeg bij JPL houdt de wacht om eventuele onvoorziene gebeurtenissen op te lossen.
Een van de topprioriteiten is het verkrijgen van een 360 graden Mastcam-kleurenpanorama met hoge resolutie. Dit is van onschatbare waarde voor de selectie van het allereerste rotsdoel om in te boren en een monster uit het interieur te halen - een prestatie die nog nooit eerder op Mars is geprobeerd.
"We besloten om naar een plek te rijden met een goed zicht op de ontsluitingen rond Yellowknife Bay om deze ontsluitingen goed te kunnen zien voor de vakantie," zegt rover science teamlid Ken Herkenhoff. "Aangezien de beelden tijdens de pauze worden geretourneerd, kunnen we ze gebruiken om te beslissen waar de eerste booroperatie moet worden uitgevoerd."
Het team verwacht ergens in januari 2013 een boordoel te kiezen na een zorgvuldig selectieproces.
De 7 voet (2 m) lange robotarm zal dat initiële, verpulverde rotsmonster naar inlaatpoorten op het roverdek brengen voor analyse door het krachtige duo van geminiaturiseerde chemielaboratoria genaamd Chemin & SAM.

Image Caption: Curiosity zet robotarm in op Sol 129 en onderzoekt rock met APXS en MAHLI wetenschappelijke instrumenten om de samenstelling van rock en bodem te karakteriseren. Dit samengestelde mozaïek is gestikt van Navcam-afbeeldingen van Sol 129 (16 december) en eerdere sols- en toont de locatie van de Chemin-monsterinlaatpoort op het roverdek. Krediet: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
De nieuwsgierigheid zal minstens een maand of langer besteden aan het onderzoeken van Glenelg voordat ze op pad gaan voor de bijna jaarlange trektocht naar haar belangrijkste bestemming - de sedimentaire lagen van de benedenloop van de 5 kilometer hoge berg genaamd Mount Sharp.

Bijschrift afbeelding: Scanning Mount Sharp vanuit Yellowknife Bay op Sol 136. Dit fotomozaïek samengesteld uit Mastcam 100-camerabeelden werd door Curiosity op Sol 136 (23 december) vastgelegd - vanaf haar huidige locatie. Het toont een deel van de gelaagde heuvel genaamd Mount Sharp, haar belangrijkste bestemming. Het verwerven van een kleurenpanorama met hoge resolutie van 360 in Yellowknife Bay is een taak met hoge prioriteit voor de rover tijdens de kerstvakantie. Krediet: NASA / JPL-Caltech / Marco Di Lorenzo / Ken Kremer
In vogelvlucht van Mars zijn de adembenemende omgeving van Mount Sharp ongeveer 10 kilometer verwijderd.
Het doel van de missie is om te zoeken naar habitats en te bepalen of Mars ooit microbieel leven in het verleden of het heden had kunnen ondersteunen tijdens de 2 jaar durende primaire missiefase.

Image Caption: Curiosity Traverse Map, Sol 130. Deze kaart geeft aan waar de nieuwsgierigheid reed tussen de landing op een locatie genaamd "Bradbury Landing" en de positie die werd bereikt tijdens Sol 130 (17 december 2012) op een plek genaamd "Yellowknife Bay" die is binnen een gebied genaamd "Glenelg". De inzet toont de meest recente benen van de traverse in meer detail. Krediet: NASA / JPL-Caltech / Univ. van Arizona