NASA's nieuwe Robotic Refueling Experiment (RRM) is een revolutionair technologiedemonstratietoestel - omhoog gebracht door de laatste shuttle-missie - dat zal testen en bewijzen of bestaande om de aarde draaiende ruimtevaartuigen die nooit bedoeld waren om te worden onderhouden, met succes kunnen worden bijgetankt en gerobotiseerd.
Het RRM-laadvermogen is een ultramodern padvindend experiment dat belooft spannende nieuwe wegen van stationwetenschappelijk onderzoek te openen dat mogelijk de levensduur van in een baan omlopende commerciële, overheids- en militaire satellieten met een waarde van miljarden dollars zou kunnen redden en verlengen.
RRM werd afgeleverd aan het International Space Station (ISS) door de vierpersoons bemanning van STS-135, de grote finale van de shuttle. Het project is een gezamenlijke inspanning van NASA en de Canadian Space Agency (CSA).
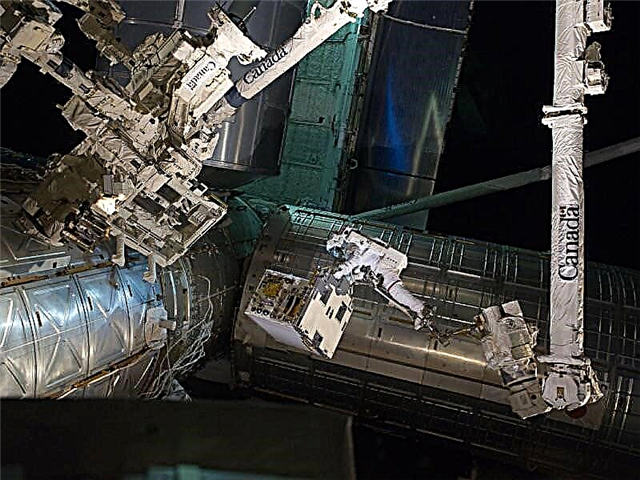
Tijdens de allerlaatste ruimtewandeling van de Space Shuttle Era werd RRM tijdelijk geïnstalleerd door de Amerikaanse astronauten Mike Fossum en Ron Garan op een platform op de Dextre-robot - de Special Purpose Dexterous Manipulator - die fungeert als een 'klusjesman' in de ruimte.
Dextre is een door CSA geleverde robot met twee armen, die ook een belangrijk onderdeel van het experiment is omdat het de uitvoering van reparatie- en onderhoudstaken mogelijk maakt in het hart van het RRM-experiment.

De wasmachine-eenheid weegt 500 pond en was weggestopt in het laadruim van Space Shuttle Atlantis en bevestigd aan de Lightweight Multipurpose Carrier (LMC) voor een enkele reis naar de ruimte.
Nadat Atlantis is vertrokken, zal RRM worden overgebracht naar een permanent bevestigingspunt op de stationsbundel en worden gemonteerd op de Exterior Logistics Carrier 4 (ELC-4) van de miljoen pond draaiende buitenpost.
RRM is NASA's allereerste dergelijke technologiedemonstratie die bedoeld is om de haalbaarheid te testen van onderhoudswerkzaamheden aan satellieten die niet zijn gebouwd om ooit te worden bewerkt en onderhouden nadat ze de ruimte in zijn geschoten, volgens Justin Cassidy, RRM Hardware Manager bij NASA Goddard Spaceflight Centrum in Greenbelt, Maryland.
De RRM-box simuleert zowel de te onderhouden satelliet als de onderhoudstechnieken die nodig zijn om zowel robotachtige tank- als reparatiewerkzaamheden uit te voeren.

"De Dextre-robot zal vier speciaal ontworpen‘ Tools ’manipuleren die zijn opgeslagen in baaien in de RRM, 'zei Cassidy in een interview in het Kennedy Space Center.
Met behulp van een high-fidelity RRM-mockup - bijgenaamd ‘Rosie’ - te zien op de Kennedy Space Center Press Site, sprak Cassidy tot in detail over de RRM-missie en doelstellingen.
De vier unieke RRM-tools hebben hun oorsprong in de Hubble Servicing Missions en zijn ontwikkeld door NASA Goddard; Het draadsnijder- en dekenmanipulatiegereedschap, het multifunctionele gereedschap, het veiligheidskapverwijderingsgereedschap en het mondstukgereedschap.
"Dextre zal de gereedschappen vastgrijpen en met zijn‘ handen ’verplaatsen om tank- en onderhoudstaken uit te voeren op activiteitenborden en gesimuleerde satellietcomponenten die op de buitenmuren van de RRM zijn gemonteerd, 'vertelde Cassidy me. "In de toekomst kunnen de activiteitenborden worden verwisseld om nieuwe experimenten uit te voeren."

De RRM-opdracht markeert het eerste gebruik van Dextre buiten routineonderhoudsklusjes aan boord van het ISS. Inderdaad, het onderzoeksproject dat met RRM werkt, is eigenlijk een nieuwe R & D-functie die verder gaat dan oorspronkelijk gepland en gepland voor Dextre, zei Mathieu Caron, CSA Mission Operations manager.
Taken die voor RRM gepland zijn, zijn onder meer het werken aan en manipuleren van doppen, kleppen en schroeven van verschillende soorten en maten, het snijden van draden, het aanpassen van thermische dekens en het overbrengen van vloeistoffen rond brandstofreservoirs. Ethanol zal worden gebruikt om de stroom van hydrazine-brandstof te simuleren, zei Cassidy.
"RRM zal worden beheerd door controllers op de grond bij NASA Goddard, het Marshall Space Flight Center in Huntsville, Ala., En ook in Canada door de Canadian Space Agency", legt Cassidy uit.
Elke RRM-tool is uitgerust met geïntegreerde camera's met zes ingebouwde LED's om grondcontrollers te helpen bij het nauwkeurig geleiden van de tools.
"De RRM-experimentfase om robotvul- en onderhoudswerkzaamheden aan het ISS te demonstreren duurt twee jaar en kan nog tien of meer jaren duren", aldus Cassidy.
President Obama vroeg de STS-135-bemanning naar het RRM-experiment tijdens een Oval Office-telefoontje van het Witte Huis naar het ISS. Bekijk het telefoontje van Obama op YouTube
NASA hoopt dat de kleine investering in RRM-technologiedemonstratie de weg zal effenen voor geavanceerde volgmissies en particuliere ontwikkeling van commerciële robotachtige tank- en onderhoudsvoertuigen - in de niet al te verre toekomst - die miljarden dollars aan kostenbesparingen en dividenden zullen opleveren.





Lees mijn functies over de Final Shuttle-missie, STS-135:
Waterkanon Begroet trompetten herstel van Last Shuttle Solid Rocket Boosters - Photo Album
Shuttle Atlantis vliegt naar Space One Laatste keer: fotoalbum
Atlantis onthuld voor historische laatste vlucht te midden van stormachtig weer
Aftellen naar de Last Shuttle; Stormachtig weer geprojecteerd
Atlantis Crew Jets naar Florida op Independence Day voor Final Shuttle Blastoff
NASA stelt 8 juli in voor de verplichte Grand Shuttle van de Space Shuttle
Final Shuttle Voyagers voeren countdown-oefeningen uit op het startpunt van Florida
Eindlading voor Final Shuttle-vlucht afgeleverd op het lanceerplatform
Last Ever Shuttle Journeys out to the Launch Pad; Fotogallerij
Atlantis gaat voor de laatste keer verticaal
Atlantis rolt naar het voertuigassemblagegebouw met de laatste Space Shuttle Crew voor 8 juli Blastoff